| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
- deque
- 알고리즘 문제
- 이진 검색
- 3190번
- 트리
- 다이나믹 프로그래밍
- 알고리즘
- BST
- 자료구조
- binary search
- 이진탐색트리
- 동적 계획법
- merge-sort
- 프로세스의 상태
- prim 알고리즘
- 중위 표기법
- kruskal 알고리즘
- 탐욕 알고리즘
- 부분 집합
- quick-sort
- 최소 비용 신장 트리
- union-find
- divide and conquer
- 최단 경로 알고리즘
- 서로소 집합
- 프로세스
- disjoint-sets
- 완전 탐색
- CPU scheduling
- 후위 표기법
- Today
- Total
Dionysus
Path Planning이란 본문
1. Path와 Trajectory의 차이점
Path
단순히 A to B를 가는 경로를 의미한다. (속도나 시간은 고려하지 않음)
Trajectory
생성된 Path를 특정 속도 혹은 특정 시간 동안 이동하는 경로를 의미한다.
조금 더 풀어 설명하면, 특정 물체가 어떠한 경로를 따라가는 형태를 시간의 함수로 풀어 나타낸 것이다.
즉, Path를 구축하고 구축한 Path를 특정 속도, 시간에 맞춰 이동하는 것이 Trajectory이기 때문에 Path와 Time Scaling을 통하면 Trajectory를 만들 수 있게 된다.

Time scaling
Time Scaling 방법으로는 Third-order polynomial, Fifth-order polynomial, Trapezoidal, S-curve Time scaling이 있다.
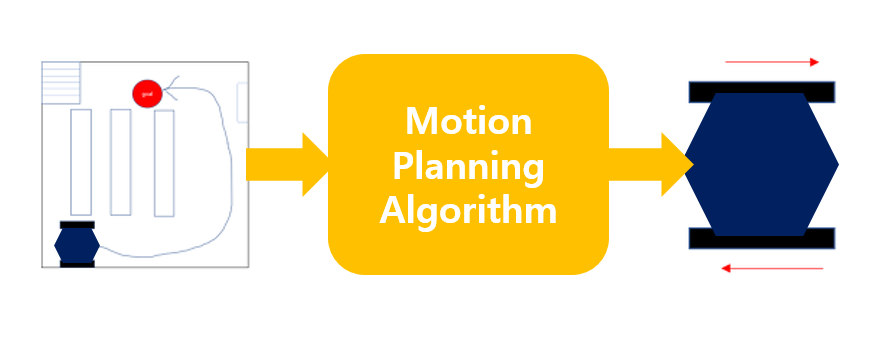
2. Motion Planning이란
Motion Planning이란 Trajectory Planning에서 한 차원 더 나아간 형태로, A to B로 이동하는 과정에서 Trajectory처럼 속도와 시간을 고려하면서도 그 외의 요소들인 장애물, 환경 또한 고려하는 것을 의미한다.

즉 Motion Planning 알고리즘은 모바일 로봇이 어떤 빌딩 안에서 주행한다고 할 때, 벽에 부딪히지 않고 계단에 떨어지지 않으며 주행하는 작업 자체를 input으로 받아들여 로봇의 바퀴에게 속도와 회전 명령을 내리게 된다.
# 참고 자료
https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=nswve&logNo=221573703005
Path, Trajectory 그리고 Motion Planning
로봇을 어떻게 움직일지 고민을 하고 찾아보다보면 Path Planning, Motion Planning, Trajectory Pla...
blog.naver.com
[사진 1] : https://blogs.mathworks.com/student-lounge/2019/11/06/robot-manipulator-trajectory/
Trajectory Planning for Robot Manipulators
NOTE: While this post will talk specifically about manipulators, many of the concepts discussed apply to other types of systems such as self-driving cars and unmanned aerial vehicles. Trajectory planning is a subset of the overall problem that is navigatio
blogs.mathworks.com
https://ropiens.tistory.com/2?category=828450
Motion Planning - 1. 개요
Motion Planning(모션 플래닝)은 로봇공학에서 사용되는 용어이다. 어떤 로봇이 움직이는 과정을 순차적인 행동들로 나누는데, 동작의 제약에 맞춰서 가능한 최적으로 움직이는 방법을 다룬다. 예를
ropiens.tistory.com
https://ropiens.tistory.com/5?category=828450
'전자공학 > Path Planning' 카테고리의 다른 글
| 2022.10.14.(금) 공부 내용 (0) | 2022.10.15 |
|---|---|
| 2022.10.13.(목) 공부 내용 (2) | 2022.10.13 |
| 2022.10.7.(금) 공부 내용 (0) | 2022.10.07 |
| 2022.10.6.(목) 공부 내용 - A*(D*), RRT, PRM 알고리즘 (0) | 2022.10.06 |
| 2022.10.05.(수) 공부 내용 - A* 알고리즘 (0) | 2022.10.05 |



